Armadillo-440/420 で故障かな?と思った時の確認手順を説明します。
このFAQでは、Armadillo-440/420 を"Armadillo"と表記します。
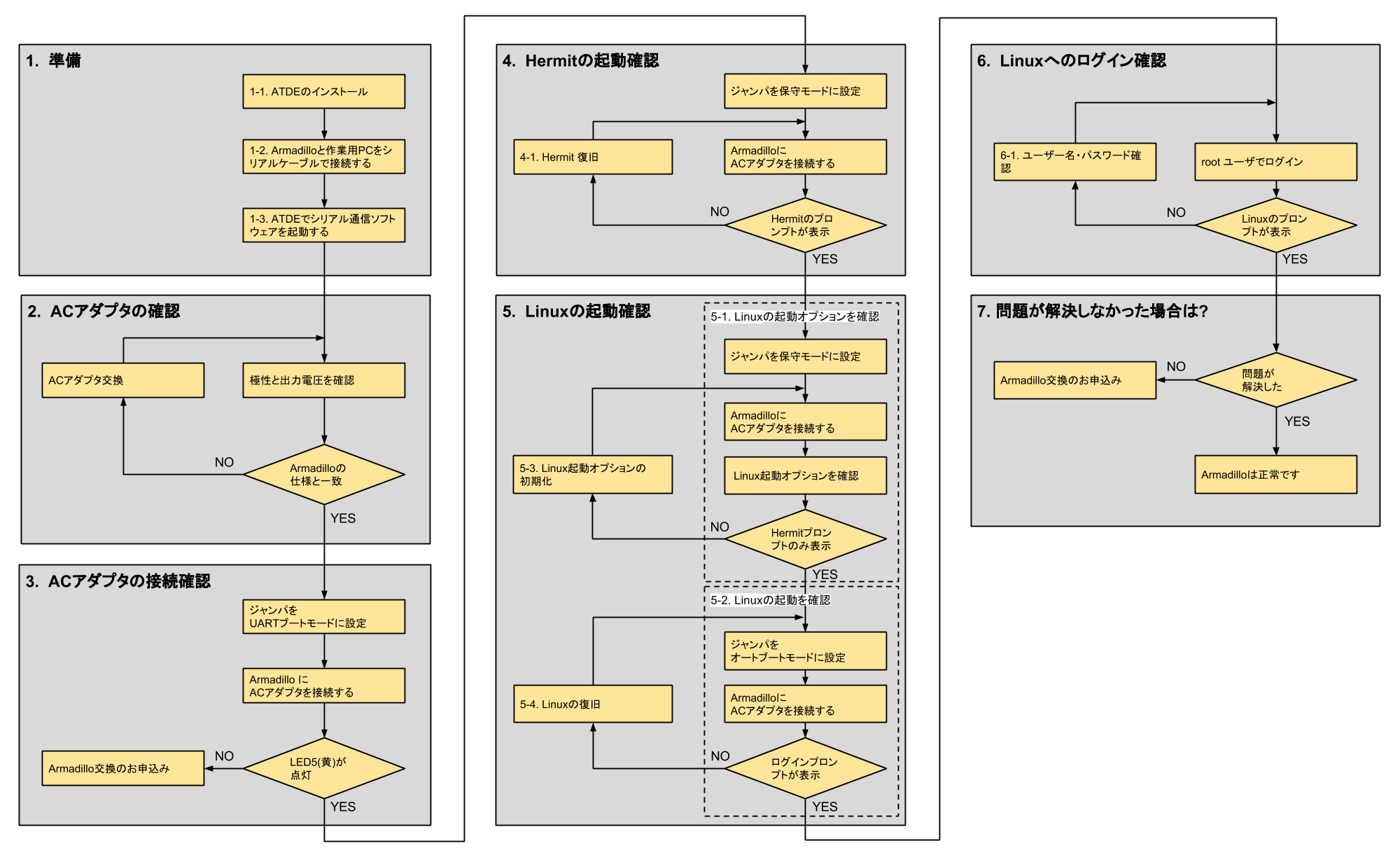
確認は下の図のような流れで行います。
目次
1. 準備
1-1. 作業用PCにATDEをインストールする
作業用PCにATDE5をインストールします。インストールの手順は製品ごとのダウンロードページの「Armadillo-400シリーズ ソフトウェアマニュアル」を参照してください。
1-2. Armadilloと作業用PCをシリアルケーブルで接続する
以下の接続例を参考に、ArmadilloのCON3と作業用PCをシリアルクロスケーブルで接続します。
ストレートケーブルを使用している場合はArmadilloとPCで通信を行なうことができません。

1-3. ATDEでシリアル通信ソフトウェアを起動する
Armadilloとシリアル通信を行うために、ATDEでminicomを起動します。minicomは端末内で動作するシリアル通信ソフトウェアです。
"GNOME端末"を起動し以下のコマンドを入力します。
[ATDE ~]$ minicom
シリアル通信ソフトウェアの設定は以下の表を参考にしてください。
| 項目 | 設定 |
|---|---|
| 転送レート | 115,200bps |
| データ長 | 8bit |
| ストップビット | 1bit |
| パリティ | なし |
| フロー制御 | なし |
もしATDEでシリアルポートが使用できない場合は、FAQ : ATDEでシリアルポートが使用できませんを参照してください。
2. ACアダプタの確認
Armadilloに電源を入れる前に、ACアダプタがArmadilloで使用できるものか確認します。Armadillo付属のACアダプタを使用している場合は問題ありません。そうでない場合は以下の表を参照してACアダプタが適切であるか確認してください。
| 出力電圧 | 出力電流 | プラグ形状 | 極性マーク |
|---|---|---|---|
| 5V | 0.5A以上 | EIAJ RC-5320A準拠(電圧区分2) 外径: 4.0mm 内径: 1.7mm |
 |
3. ACアダプタの接続確認
ACアダプタがArmadilloにしっかり接続されているかを確認します。 ジャンパをUARTブートモードに設定して、ArmadilloにACアダプタを接続します。
ACアダプタがArmadilloに接続されていれば、LED5(黄)が点灯します。
ACアダプタがしっかり接続されていてLEDが点灯しない場合は、製品保証規定をご確認の上、交換のお申込みを行ってください。
4. Hermitの起動確認
ArmadilloのブートローダであるHermitを起動することができるか確認します。 ジャンパを保守モードに設定してArmadilloにACアダプタを接続します。 以下のようにHermitのプロンプトが表示された場合は問題ありません。Linuxの起動確認に進んでください。
hermit>
もしHermitのプロンプトが表示されない場合はHermitを復旧してください。
4-1. Hermitの復旧
フラッシュメモリに書き込まれたHermitのイメージファイルに問題がある場合はHermitを起動することができません。そのためHermitのイメージファイルを書き替える必要があります。
まず、ACアダプタを抜いた状態でジャンパをUARTブートモードに設定します。
4-1-1. ATDEでshoehornを起動する
hermitを復旧できる状態にするために、ATDEでshoehornを起動します。ATDEで、minicomなどのシリアル通信ソフトウェアは事前に終了しておく必要があります。shoehornを起動するコマンドは以下の例を参考にしてください。
[ATDE ~]$ shoehorn --boot --terminal --target armadillo4x0 \
--initrd /dev/null \
--kernel /usr/lib/hermit-3/loader-armadillo4x0-boot-v3.*.bin \
--loader /usr/lib/shoehorn/shoehorn-armadillo4x0.bin \
--initfile /usr/lib/shoehorn/shoehorn-armadillo4x0.init \
--postfile /usr/lib/shoehorn/shoehorn-armadillo4x0.post --port [PORT]
[PORT]には、ATDE5のArmadilloを接続しているシリアルインターフェースを指定してください。/dev/ttyUSB0にArmadilloが接続されている場合は、[PORT]を/dev/ttyUSB0に読み換えてください。
4-1-2. ArmadilloにACアダプタを接続する
ArmadilloにACアダプタを接続します。すぐにメッセージの表示が開始され、以下のようにHermitのプロンプトが表示された場合shoehornコマンドは成功です。
hermit>
もし失敗してしまった場合は、Hermitの復旧の手順を最初から確認してください。
4-1-3. Ctrl-Cを押下してshoehornを終了させる
shoehornを起動した"GNOME端末"でCtrl-Cを押下してshoehornを終了させます。このとき、ジャンパの設定を変更したりACアダプタを切断したりしないように注意してください。
4-1-4. Hermitのイメージファイルをダウンロードする
フラッシュメモリに書き込むHermitのイメージファイルをダウンロードします。製品ごとのダウンロードページからHermitのフラッシュイメージファイルをダウンロードしてください。
ダウンロードするファイルはloader-armadillo4x0-v3.X.X.binです。Xはバージョン番号です。最新のものをダウンロードしてください。
4-1-5. Hermitをフラッシュメモリに書き込む
hermitコマンドを使用してダウンロードしたHermitのイメージファイルをフラッシュメモリに書き込みます。hermitコマンドのオプション--input-fileの引数には、Hermitのイメージファイルをダウンロードするでダウンロードしたイメージファイルを指定してください。hermitコマンドは以下の例を参考にしてください。
[ATDE ~]$ hermit download \
--input-file loader-armadillo4x0-v3.X.X.bin \
--region bootloader --port [PORT] \
--force-locked
[PORT]には、ATDE5のArmadilloを接続しているシリアルインターフェースを指定してください。/dev/ttyUSB0にArmadilloが接続されている場合は、[PORT]を/dev/ttyUSB0に読み替えてください。
Hermitの書き込み終了後は、再度Hermitの起動確認を行なってください。もし失敗してしまった場合は、Hermitの復旧の手順を最初から確認してください。
5. Linuxの起動確認
Linuxの起動を確認します。
5-1. Linuxの起動オプションを確認
ジャンパを保守モードに設定してArmadilloにACアダプタを接続します。
Linuxの起動オプションが適切に設定されていない場合はLinuxを起動することができません。
setenvコマンドを入力してLinuxの起動オプションを確認します。
以下のようにHermitのプロンプトのみが表示された場合は問題ありません。Linuxの起動を確認へ進んでください。
hermit> setenv
hermit>
もし、以下のようにLinuxの起動パラメータか表示された場合は、Linuxの起動オプションの初期化を行なってください。
hermit> setenv
1: console=tty1
hermit>
5-2. Linuxの起動を確認
ACアダプタを抜きジャンパをオートブートモードに設定してから、ArmadilloにACアダプタを再び接続します。
起動ログが表示され、以下のようにログインプロンプトが表示された場合は問題ありませんのでLinuxへのログインに進んでください。
armadillo420-0 login:
もしログインプロンプトが表示されなかった場合は、Linuxの復旧を行ってください。
5-3. Linuxの起動オプションを初期化
Linuxの起動オプションが適切に設定されていない場合はArmadilloを起動することができません。以下のコマンドを入力して起動オプションを初期化してください。
hermit> clearenv
hermit>
起動オプションの初期化を行なった場合は、再度Linuxの起動オプションを確認してください。
5-4. Linuxの復旧
使用しているLinuxのイメージファイルに問題がある場合はLinuxを起動することができません。そのためLinuxのイメージファイルを書き替える必要があります。まず、ジャンパを保守モードに設定してArmadilloにACアダプタを接続します。
5-4-1. Linuxのイメージファイルをダウンロードする
フラッシュメモリに書き込むLinuxのイメージファイルをダウンロードします。製品ごとのダウンロードページからLinuxカーネルとユーザーランドのイメージファイルをダウンロードしてください。ファイル名は以下の表を参照してください。
| Armadillo | Linuxカーネル | ユーザーランド |
|---|---|---|
| Armadillo-440 | linux-a400-2.XX.bin.gz |
romfs-a440-2.XX.img.gz |
| Armadillo-420 | linux-a400-2.XX.bin.gz |
romfs-a420-2.XX.img.gz |
Xはバージョン番号です。最新のものをダウンロードしてください。
5-4-2. Linuxカーネルをフラッシュメモリに書き込む
hermitコマンドを使用してLinuxカーネルのイメージファイルをフラッシュメモリに書き込みます。hermitコマンドのオプション--input-fileの引数には、LinuxのイメージファイルをダウンロードするでダウンロードしたLinuxカーネルのイメージファイルを指定してください。
[ATDE ~]$ hermit download --input-file linux-a400-2.XX.bin.gz --region kernel --port [PORT]
[PORT]には、ATDE5のArmadilloを接続しているシリアルインターフェースを指定してください。/dev/ttyUSB0にArmadilloが接続されている場合は、[PORT]を/dev/ttyUSB0に読み替えてください。
5-4-3. ユーザーランドをフラッシュメモリに書き込む
hermitコマンドを使用してユーザーランドのイメージファイルをフラッシュメモリに書き込みます。hermitコマンドのオプション--input-fileの引数には、Linuxのイメージファイルをダウンロードするでダウンロードしたユーザーランドのイメージファイルを指定してください。
[ATDE ~]$ hermit download --input-file romfs-a420-2.XX.img.gz --region userland --port [PORT]
[PORT]には、ATDE5のArmadilloを接続しているシリアルインターフェースを指定してください。/dev/ttyUSB0にArmadilloが接続されている場合は、[PORT]を/dev/ttyUSB0に読み替えてください。
5-4-4. ブートデバイスをフラッシュメモリに設定する
ブートデバイスがフラッシュメモリに設定されていないと、先ほど書き込んだ Linuxのイメージファイルが使用されません。以下のコマンドを入力してください。
hermit> setbootdevice flash
hermit>
ここまでの手順が終了した場合は、再度Linuxの起動を確認してください。
6. Linuxへのログイン確認
Linuxにログインできるか確認します。まずは、Linuxの起動確認の手順に従ってログインプロンプトを表示させます。
ここでは、rootユーザでログインします。パスワードの入力時には画面に何も表示されませんが、rootと入力してEnterキーを押下してください。以下のようにLinuxのプロンプトが表示された場合は問題ありません。
armadillo420-0 login: root
Password:
[root@armadillo420-0 (ttymxc1) ~]#
もしLinuxのプロンプトが表示されない場合はユーザ名およびパスワードを確認してください。
6-1. ユーザ名およびパスワードの確認
ユーザ名またはパスワードに誤りがないか確認します。標準イメージファイル1を使用している場合のユーザ名およびパスワードは以下の表を参照してください。 また、標準イメージファイルを使用していない場合は、Linuxの復旧を参照し、標準イメージファイルをフラッシュメモリに書き込んでください。
| ユーザ名 | パスワード |
|---|---|
| root | root |
| guest | (なし) |
ユーザ名およびパスワードは、それぞれ小文字で入力する必要があります。CapsLockがオフになっていることを確認してください。
7. 問題が解決しなかった場合は?
本手順は、動作モードの設定や使用するイメージファイルにより結果が変わってしまいます。 問題が解決しない場合は、手順に注意し再度確認してください。
手順通りに作業を行い問題が解決しない場合は、製品保証規定をご確認の上、交換のお申込みを行ってください。
Appendix. ジャンパの設定
Armadilloは、ジャンパの設定を変えることで、起動時の動作を変更することができます。起動モードの名称と動作の関係については以下の表を参照してください。
| 起動モード名称 | 起動時の動作 |
|---|---|
| オートブートモード | Linuxカーネルを起動 |
| 保守モード | Hermitコマンドプロンプトを起動 |
| UARTブートモード | CPU オンチップブートROMを起動 |
ジャンパの位置については、製品ごとのダウンロードページにある"Armadillo-400シリーズ ハードウェアマニュアル"を参照してください。
ジャンパの設定は以下の表を参考にしてください。
| ジャンパの設定 | 状態 |
|---|---|
| オープン | ジャンパピンにジャンパソケットを接続しない |
| ショート | ジャンパピンにジャンパソケットを接続する |
A-1. ジャンパをオートブートモードに設定する
以下の表を参考にしてジャンパを設定してください。
| ジャンパ | 設定 |
|---|---|
| JP1 | オープン |
| JP2 | オープン |
A-2. ジャンパを保守モードに設定する
以下の表を参考にしてジャンパを設定してください。
| ジャンパ | 設定 |
|---|---|
| JP1 | オープン |
| JP2 | ショート |
A-3. ジャンパをUARTブートモードに設定する
以下の表を参考にしてジャンパを設定してください。
| ジャンパ | 設定 |
|---|---|
| JP1 | ショート |
| JP2 | - |
JP2は、オープン/ショートどちらの設定でも構いません。
製品ごとのダウンロードページ
| Armadillo | ダウンロードページ |
|---|---|
| Armadillo-440 | Armadillo-440 ソフトウェアダウンロード |
| Armadillo-440 | Armadillo-440 ドキュメントダウンロード |
| Armadillo-420 | Armadillo-420 ソフトウェアダウンロード |
| Armadillo-420 | Armadillo-420 ドキュメントダウンロード |