at_kazutaka.bito
用意するもの
- USB電源ケーブル
- USB電流電圧チェッカ
- USBバッテリ(PC、モバイルバッテリなど)
USBバッテリ--USB電源ケーブル--USB電流電圧チェッカ と接続する。
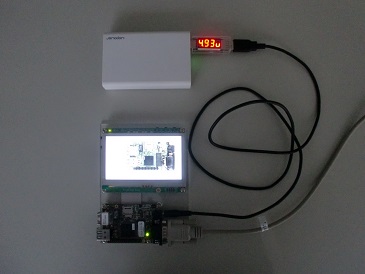
Armadillo-440開発セットで標準イメージで起動したとき 通常動作時の電圧(標準イメージ内のサンプルソフトfunctesterが動作中)
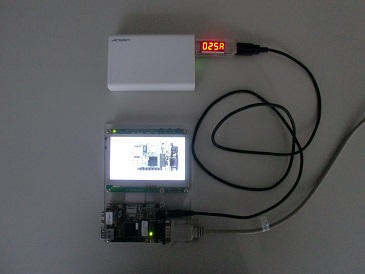
Armadillo-440開発セットで標準イメージで起動したとき 通常動作時の電流(標準イメージ内のサンプルソフトfunctesterが動作中)
Armadillo-440開発セットで標準イメージで起動したとき スリープ時の電圧(power-on suspend)